
 Share This Page
Share This Page| Home | | Drones | | | Share This Page |
 A Virtual Bird
A Virtual BirdAn intriguing application of modern technology
Copyright © 2015, Paul Lutus — Message Page
Most recent update:
(double-click any word to see its definition)

Figure 1: DJI Phantom Vision 2+ Version 3
(station-keeping in three dimensions using GPS navigation,
waiting for user instructions, and posing for the camera)
Before I get into a discussion of quadcopters and related topics, let me provide some personal background. The technological high point of my life was the day I purchased an Apple II in 1977, because it meant I could do more and better mathematics, model many kinds of physical systems, organize my thoughts more efficiently, and be more productive, using the personal computer as an intellectual tool. I doubt that any of the more recent technological breakthroughs can ever be as game-changing as the personal computer was for me.
Having said that, in my opinion the recent development of affordable GPS-enabled drones represents a close second in the all-time game-changing technological sweepstakes. Although drones appear at first glance to be a straightforward application of simple physics — air gets pushed down, craft get pushed up — in fact they represent an intersection of multiple breakthroughs in electronic miniaturization, robotics, applied computer science, satellite navigation, and imaging. And, like the personal computer, it's unlikely that anyone will be able to foresee their long-term impact, once they've evolved as personal computers have done.
To give you a sense of how remarkable these small drones are, let me tell you how I created Figure 1. I started my quadcopter by throwing a few switches, waited for a ready signal, pushed a joystick to make the craft ascend to a suitable altitude (about eight feet or 2.4 meters), waited a few more minutes while the craft acquired a stable GPS lock and became rock steady, then put down the remote control and picked up a camera, confident that the quadcopter wouldn't move more than a few feet in any direction. This isn't even slightly exaggerated.
With that as an introduction, let's get started.
Here's a list of videos and photospheres I've created using my quadcopter:
- Quadcopter Tree Height Survey version 2 — a short video showing how to measure tree height.
- Photosphere Gallery.
Be sure to read my photosphere creation article.
A modern quadcopter that meets the definition of a drone (meaning a remotely controlled craft, also sometimes meaning a self-guiding, autonomous craft) accomplishes this by exploiting a number of modern technical resources — advances in battery technology, computers and electronics, the satellite-based Global Positioning System (GPS), various kinds of sensing technologies, and advanced two-way radio communications.
In this section I'll describe a recent acquisition of mine — a DJI Phantom Vision 2+ version 3 (disclaimer: I have no connection of any kind with DJI, I'm just a happy customer). This machine's remote control (hereafter RC) allows a pilot to guide the craft in three dimensions, but remarkably, because of the craft's reliance on the GPS navigation system, if the pilot releases the controls, the craft comes to a stop in the air and hovers, awaiting further instructions. The remote control provides a first-person view (hereafter FPV) with a user-supplied WiFi-equipped iPhone/Android device as a display. This means if the craft is too far away to see clearly, one may use the FPV to position and rotate the craft for (among other things) photography.
The craft is equipped with a camera that can take high-resolution (1920x1080) video and 14MB (4384x3288) still images, both under the pilot's control. The manufacturer claims the craft's battery can provide 25 minutes of operating time, but in my experience, 15 minutes is more realistic in typical use. If for any reason the craft loses radio contact with the RC, or if the battery's remaining capacity drops below 20% of a full charge, the craft will automatically and autonomously fly back to its starting point and land (a feature called "Return To Home" or RTH). In connection with this feature and as a warning, if the pilot moves the craft too far away too fast, or if he doesn't follow all required preflight procedures to the letter, the RTH feature may fail (there's more discussion of this issue below). Sites like YouTube have any number of videos of DJI drones following the pilot's ill-considered instructions, then either being unable to return to home and/or crashing after the battery couldn't power the system any more.
The above-described features rely on a rather complex system of radios and control schemes. While in operation, the craft is overseeing:
- A communication downlink from the Global Positioning System (GPS) satellite navigation network to the craft's GPS receiver for accurate position information.
- A communication uplink from the RC to the craft for flight control (four channels), switches S1 and S2 (two channels), and (in the newest DJI remote controls) camera pitch (one channel).
- A communication downlink/uplink to provide an FPV (First-Person View) using the craft's camera, provide battery and related information, and accept camera commands (positioning and still-image shutter control).
- A complex computer program that accepts inputs from the GPS receiver, a "Hall effect" terrestrial magnetic field sensor (i.e. a compass) and the pilot's uplinked commands, to control the craft's propellers to move the craft to a commanded position or remain stationary (details below).
The above is a simplified description of the control scheme. Not mentioned is a new feature in the most recent DJI models called "Ground Station" that allows the pilot to enter a series of waypoints for the craft to follow, then issue an "execute" instruction to make the craft autonomously fly the described route and return home.
Apart from allowing operation beyond direct line-of-sight, the FPV allows accurate camera pointing for video and still photography from the camera's perspective. In keeping with current events I should mention that this FPV operation mode beyond direct line of sight, as well as the "Ground Station" feature described above, conflict with the FAA proposed drone operating rules published in February 2015, which requires constant line-of-sight between pilot and craft.
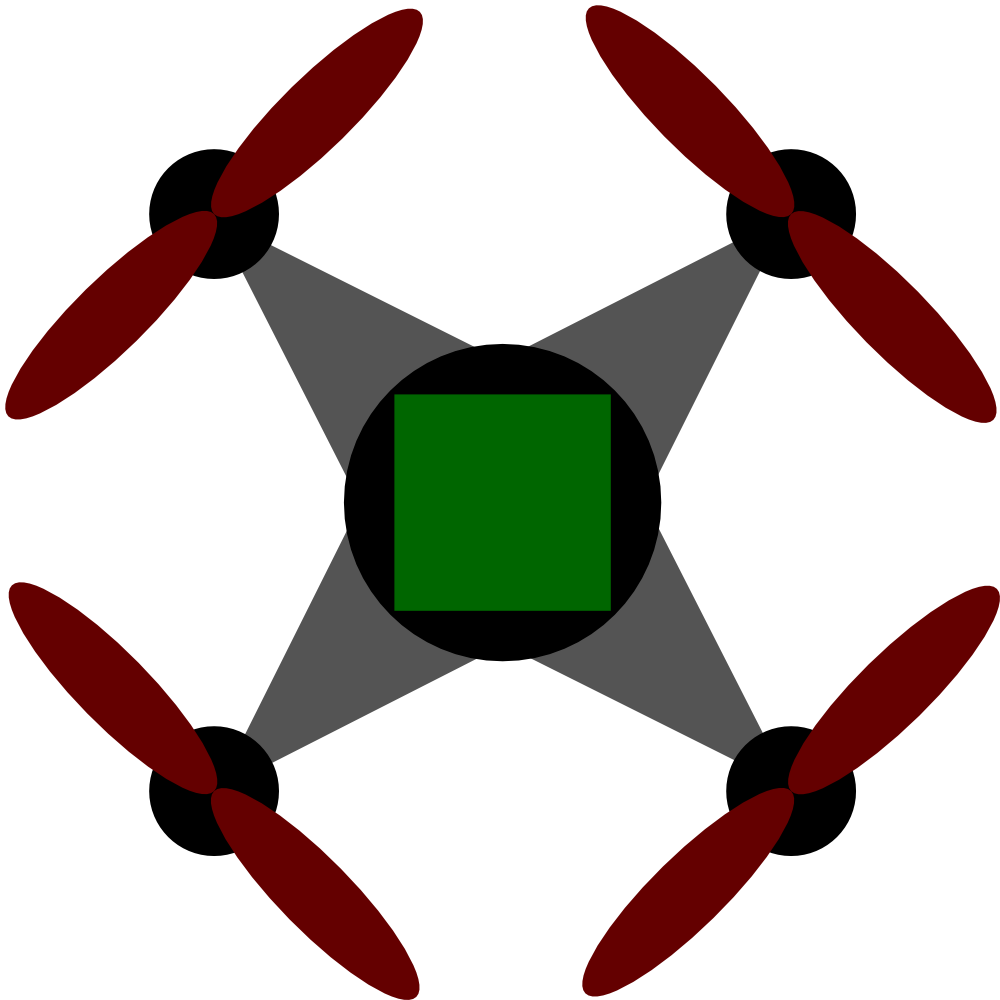
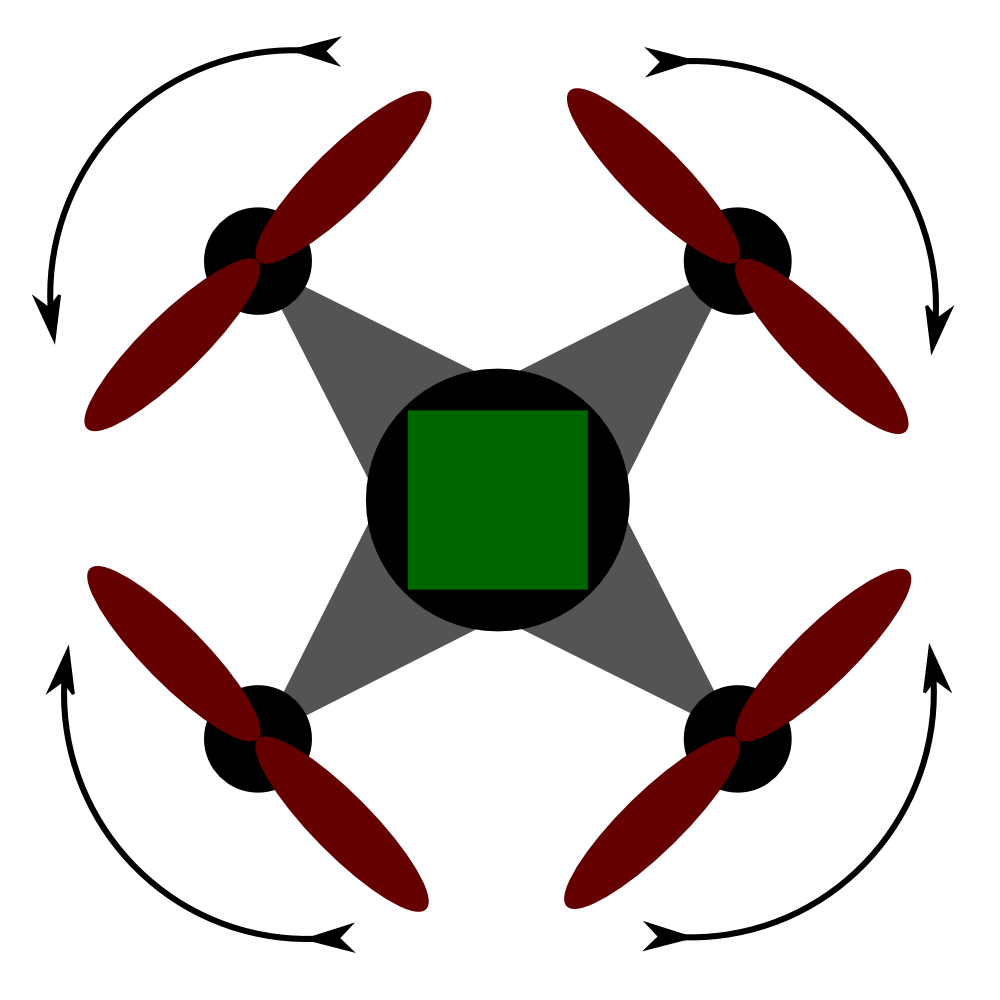 Figure 2: Quadcopter stabilization scheme
Figure 2: Quadcopter stabilization schemeHow do helicopters work?
A conventional helicopter is lifted into the air by a large central rotor, which spins two or more airfoils through the air and, by pushing air downward, lifts the craft. But because of Newton's Third Law of Motion ("For every action, there is an equal and opposite reaction"), the rotation of the primary rotor applies a force that would make the helicopter body rotate in the opposite direction. Modern helicopters have a secondary rotor at the tail of the craft that acts to counter this force and keep the craft stable. A secondary function of the tail rotor is to provide directional control.At first glance, a quadcopter is like a helicopter with four main rotors instead of one. What keeps the quadcopter's body from rotating the opposite way, like a helicopter without a tail rotor?
See Figure 2. A quadcopter solves the counter-rotation problem by having four rotors, two of which rotate clockwise, and two counterclockwise. This balances the rotation force applied to the craft's body and assures stability. This, by the way, is why most multi-rotor craft have an even number of rotors — half the rotors spin clockwise, half counterclockwise.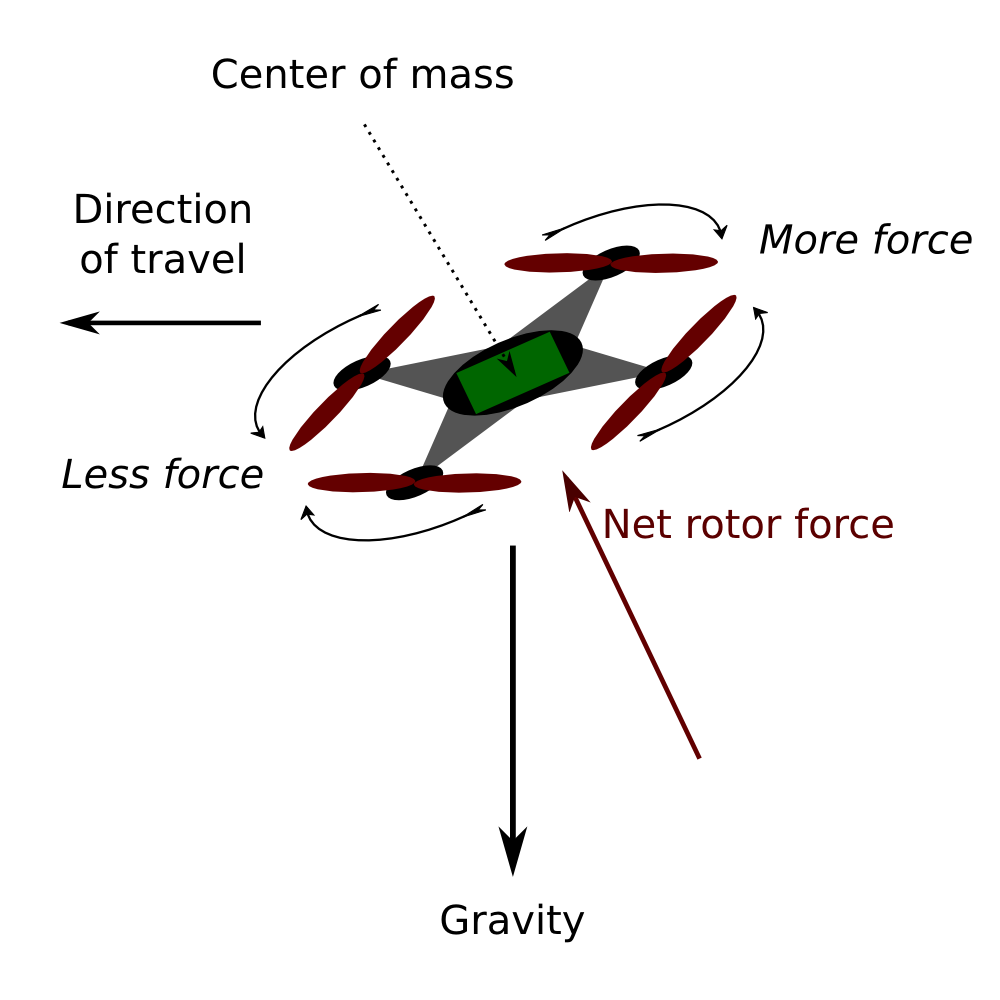 Figure 3: Quadcopter force vectors
Figure 3: Quadcopter force vectorsHow does a quadcopter rotate when it needs to?
See Figure 2 again. To change the craft's heading, for example to turn counterclockwise, the computer controller changes the power applied to the rotors. The two clockwise rotors get more power, and the two counterclockwise rotors get less, but in such a way that the total power remains the same. This means the overall lifting force remains the same, but the craft experiences a counterclockwise force according to Newton's Third Law.How does a quadcopter move in a straight line?
See Figure 3. The computer controller responds to a user's joystick input or other command by decreasing the power to those rotors on the side of the craft in the desired direction of travel, while increasing the power to the rotors on the opposite side, while keeping the total power the same. This maintains the craft's altitude while tilting the craft in the desired direction of movement. The imposed tilt causes the lifting force vector to point away from the vertical. The craft moves in a direction and velocity resulting from the subtraction of the force vector from the gravity vector.
While flying, what's a good rule for maximum safe horizontal travel distance?
A modern quadcopter like the one I describe at the beginning of this article reveals how much battery power is left. So while outbound, watch the battery level and, when it gets to 50%, turn around. Even this strategy might not solve all battery problems, because my machine goes into autonomous RTH (return to home) mode at a battery level of 20%, and to land with any precision, the pilot will need to regain control as the craft approaches the landing point.
But I add this warning — if you fly outbound until the 20% battery warning sounds and the craft enters the RTH mode, chances are it won't make it back to the starting point and you will have to retrieve the craft wherever it falls to the ground.
How can I maximize battery life?
First, think about simple physical principles:
- Ascending in altitude uses energy that isn't regained by descending, so multiple ascents and descents use up battery power quickly.
- High speed travel uses battery power more quickly than covering the same distance at a slower speed. The reason is that air resistance increases as the square of velocity.
- To modify the above point, because hovering requires battery power, there's an optimal horizontal speed to maximize range and minimize battery usage, and it's somewhere between zero and the highest achievable speed. That optimal speed depends on wind direction and velocity, altitude, air temperature, and many other factors, so it's not something that can be easily computed.
- It turns out that hovering in place requires more power than moving at slow speed. The reason is that hovering creates a column of turbulent, downward-moving air that the craft must perpetually ascend through, while moving horizontally means the craft is always encountering stationary air. So from a battery standpoint, some horizontal speed is better than none.
- Flying a GPS-stabilized craft on windy days requires more battery power than on a calm day, for two reasons:
- Maintaining a desired hover position in the air requires more power to compensate for gusts and changes in wind direction.
- In a well-known natural perversion, any (yes, any) round-trip flight has a greater airborne distance on a windy day than a calm day.
Second, keep your propellers clean if they get dirty during use (most do). Replace propellers that get scarred or roughed up during mishaps, for two reasons — a scarred propeller has more air resistance, and it's no longer balanced, which stresses motor bearings and wastes energy shaking the craft (and the camera).
Third, don't make your quadcopter carry any weight it doesn't have to. Most quadcopter configurations have an inflexible takeoff weight, but if there's any way to reduce the craft's mass, doing so will improve battery life.
If a helicopter descends vertically into its own wash, this can be dangerous. Does this happen to quadcopters also?
Yes, it does. The effect you're referring to is called a "Vortex Ring State" or "Settling with Power". The idea is that a hovering helicopter stands at the top of a vertical column of downard-moving air responsible for holding the craft in position (again because of Newton's Third Law). If the helicopter descends directly into this column of moving air, it can lose control and be thrown to the ground.
The same effect is possible in a quadcopter, but to reduce the risk, some control programs limit their vertical descent rate (recent DJI quadcopters do this). Unfortunately, this means the craft can't descend very quickly, and this can produce another problem — running out of battery power during a long descent. There are accounts of quadcopters descending slowly from high altitudes, then, before getting to the surface, running out of battery power and crashing. One remedy is to stay within the FAA proposed altitude limit of 400 feet (120 meters) (in the U.S.). Another remedy is to avoid getting too close to battery power limits.
I've heard that, unless a quadcopter's compass is calibrated, the craft can fly away. Is this true?
Yes, it's true. Under normal circumstances a quadcopter's compass provides information about rotation with respect to the earth, which only requires that changes in direction be detected, not actual directions (North, South, etc.). But if the craft has a "fly home" feature to deal with various kinds of failures, a special algorithm is executed that must know real directions:
- If battery power falls below a preset limit, or if the flight-control communications link is broken, the computer controller activates a special "fly home" algorithm.
- In the "fly home" mode, the controller compares its present GPS position with the position of its starting point. It then computes a vector (a direction and a distance) for travel home by subtracting one position from the other.
- The controller then determines which way to fly home by comparing the computed vector's heading with the present compass heading, and rotates the craft so the two headings are the same.
- But if the craft's electronic compass hasn't been calibrated, the computer won't be able to determine accurate compass headings, and in the worst case may fly away from the real direction home and be lost.
This is why every quadcopter pilot should have a preflight checklist, and should follow it to the letter before each flight (more on this topic below).
There's an online account of someone who bought a quadcopter, flew it until the battery got low, at which point the craft flew away, never to be seen again. The pilot chalked the experience up to bad luck, bought another quadcopter, only to see that craft fly away too. The pilot tried to blame the manufacturer. I wasn't there so I can't be sure, but I strongly suspect the pilot didn't read the instructions and didn't calibrate his compass before flying.
After my craft stabilizes in a GPS-controlled hover, if I rotate the craft, it sometimes moves horizontally a significant distance before returning to its original hover point. Why?
Reason 1: This normally happens on a day with some wind. The anomaly arises in the control program:
- To establish a stable GPS hover, a quadcopter applies the exact amount of power each of its rotors needs to maintain its position. This position stabilization may require several minutes.
- The above action takes the craft's center of mass into account (which is never exactly where it should be), as well as any wind velocity that might try to push the craft out of a stable position. But the control program doesn't think about its actions like that — it simply adjusts the rotor power levels until the craft stabilizes at the user-specified three-dimensional GPS position.
- This means if you rotate the craft, the effect of the center of mass remains the same, but the wind suddenly seems to be blowing from a different direction, so to restabilize, the program has to readjust all the power levels, just as though the wind had actually changed direction. But immediately after the turn, the craft can move a considerable distance before the control program corrects the power levels.
This effect of rotation is less noticeable with less wind, and should not exist on a completely calm day. But because establishing a stable GPS hover may require several minutes, even a small amount of air movement can produce the anomaly.
Reason 2: When you rotate the craft, you're rotating the GPS receiver's antenna, and this may cause the receiver to choose different satellites for the best fix. The new fix can differ from the old, which may cause the craft to move to a new position.
I'm a long-time pilot, instrument-rated, and apart from owning a number of full-sized airplanes over the years, I have experience with hang gliders, parachutes, powered ultralights, and radio-controlled models. I also designed part of the NASA Space Shuttle. But none of this experience makes me think I can automatically fly a new craft without a slow and careful familiarization process. In fact, based on experience I assume I'll have to learn each new craft like a beginner. So to learn to fly quadcopters, I chose a large, flat area with no nearby trees or obstacles, and I only flew on windless days.
There's one big difference between modern quadcopters and the more traditional radio-controlled airplanes — if you want to take it slow, you can, because if you stop issuing instructions, the quadcopter will come to a stop in the air until you decide what to do next. In fact, assuming a large open area with no obstacles, fresh batteries and no wind, if you get confused and want time to think, just release the controls — in most cases, this is perfectly safe.
Before flying, it's important to go through some preliminaries. The following instructions apply to recent DJI quadcopters:
- Before going to the field, charge all the batteries including spares, and be sure to charge the iPhone/Android display device you intend to use.
- Choose a place to practice where there are no people and no obstacles.
- On arrival at the practice field, set up the craft and the remote — remove the camera lens cap and gimbal clamp, insert a battery into the craft, turn on the remote first, then turn on the craft (one short, then one long press).
- Perform a compass calibration using these instructions. Very important.
- Until the craft has an acceptable GPS fix, the aft LEDs will flash yellow. Don't fly until the aft LEDs flash green, indicating an acceptable GPS fix.
You've performed all the necessary preliminaries, and it's time to get proper flying instruction, something beyond a text-based Web page like this. Here are some videos that may help.
After flying in large, flat practice areas until I was able to control my quadcopter, I decided to try taking pictures of my house. This involved flying near my house and ascending to a relatively high altitude to get a bird's eye view.
But I quickly encountered a problem — as soon as the craft flew farther away than about 150 feet (46 meters), I lost the FPV and some alarming error messages began to appear, like "Warning: not enough battery power to return." I decided the messages were bogus, and since I was able to direct the craft by line of sight, I turned it and guided it back to the landing point.
I decided to investigate the loss of communications. I put the craft on the ground near my house and moved away with the RC — that way, I wasn't simultaneously trying to fly the craft while debugging it. In these tests I discovered that the FPV and battery state feedback signals were disappearing at an absurdly short distance. This turned out to be true only near my house — if I moved both the craft and the RC away from my house, the range gradually increased. At that point it occurred to me that my house was too noisy at the frequencies used by the quadcopter's communication links. So I embarked on a mitigation program:
- I switched off the WiFi feature on several laptops that had them activated but wasn't using them.
- I reduced the transmit power level on my two wireless routers — they were set to a power level higher than really necessary.
- On investigation I discovered that, if the FPV link was lost, the quadcopter range extender's WiFi server would go down, at which point my Android device would automatically switch to a wireless router it had connected to in the past, and would never check for a reappearance of the quadcopter server. The remedy is to disable (in Android terminology, "forget") any router connection except the quadcopter server. That way, the display device will patiently wait and reconnect only with the quadcopter server if it should reappear.
The above steps completely solved the FPV range issue, at least for the distances I needed that day, like a vertical distance of 400 feet (about 120 meters) and a horizontal distance of perhaps 200 feet (about 60 meters). If I increase operational range I may have to reevaluate this issue, but for now, FPV range is no longer an issue.
But for others in similar circumstances, I offer this remediation list:
- It's been my experience that an iPhone/Android device's Bluetooth feature can sometimes interfere with quadcopter communications. On the device used for FPV display, disable Bluetooth to maximize WiFi communications reliability. In other words, only enable your device's WiFi feature — disable all other wireless services.
- If you have control over local wireless devices, turn off any that you aren't using.
- If you have control over wireless routers near where you'll be flying, reduce their power level to a minimum.
- Because your iPhone/Android device is your FPV display, configure it carefully — disable any WiFi connections the device might switch to if the quadcopter's signal should temporarily disappear. In other words, make the quadcopter's server the only choice.
- Be sure to orient the RC to maximize signal strength at the quadcopter (a 45° angle between the RC antenna and the quadcopter works best). Signal levels can change dramatically if either the RC or the quadcopter are rotated away from optimal headings.
- Or, if none of the above works, avoid flying the quadcopter at long ranges.
To date, I've flown my quadcopter a maximum of 1200 horizontal feet (366 meters) in a range test (far from interfering wireless sources). At the maximum range, the FPV was becoming very erratic, and this was the primary reason for ending the test, not battery capacity or flight control — I realized if I lost FPV entirely, I wouldn't be able to reorient or guide the craft for the return flight.
To me personally, GPS-controlled quadcopters are a perfect mixture of aviation, two-way radio and computer hardware/software themes — three of my personal (and professional) interests. For a number of years I've been watching the radio-controlled model helicopter market, hoping to see a practical camera platform appear that could be operated easily and flexibly. Until recently, the only reasonably priced model helicopters were gas-powered, tricky to operate and very expensive — and most weren't practical as a camera platform.
As it happens, I was just one of many who saw the possibilities for a stable, reliable airborne camera platform, because a number of companies are now competing to meet professional and consumer market demand, to the degree that little drones have become rather controversial.

Figure 4: Nearby state park from 400 feet AGL
(Click image for full size)
View aerial photospheres from Alaska, Canada and Washington State.
I'm still learning how the public views quadcopters. I've recently been surveying my neighborhood, looking for suitable flying/practice locations. One candidate location happens to be a state park, with a huge unobstructed field, essentially perfect. I knew that paragliders launched and flew from a nearby cliff (catching the onshore marine breezes to lift them into the air) so I assumed on that basis that quadcopters would also be permitted to operate there.
So I visited the site (Figure 4) and flew for a few minutes. Pretty soon a state park ranger appeared and politely told me I couldn't fly there. That was a shame, because the central field couldn't be more perfect for flying — clear of obstructions, nice views of the environment, not used very much by the public. But on reflection I see the reasoning behind the decision to exclude quadcopters — if they were permitted, then operators of the older gas-powered radio-controlled models would reasonably argue that they should be permitted also. People visiting the park might prefer not to be buzzed by noisy gadgets that might be invading their privacy with all-seeing cameras.
A modern quadcopter isn't as noisy as one of the older radio-controlled models, it's certainly not as masssive as a paraglider with a human pilot, but in the negative column a quadcopter can do things the others can't manage, like hover a few feet away from people and take pictures. My point is that society hasn't figured out how it wants to react to these things. And once quadcopters have been exploited by terrorists (yes, that will happen), the issue will become more polarized, between the good quadcopter users and the bad ones.
Meanwhile, they're a lot of fun. Let's see how long that lasts.
| Home | | Drones | | | Share This Page |